在工業(yè)4.0和數(shù)字化轉型的浪潮下,離散型智能制造正成為現(xiàn)代制造業(yè)的核心范式。它并非一個孤立的系統(tǒng),而是一個深度融合了自動化、信息化和智能化技術的復雜生態(tài),其中,智能機器人扮演著至關重要的角色。
一、離散型智能制造的概念
離散型智能制造,是針對“離散制造業(yè)”的智能化升級。所謂離散制造業(yè),是指產品由多個獨立的零部件組裝而成,生產過程通常是不連續(xù)的、分階段的,例如汽車、飛機、電子產品、機械裝備等的制造。其產品結構清晰,可被分解為具體的物料清單(BOM)。
因此,離散型智能制造是指:通過集成物聯(lián)網(IoT)、大數(shù)據(jù)、人工智能(AI)、數(shù)字孿生、云計算等先進技術,對離散制造的生產全鏈條(包括研發(fā)設計、計劃排程、加工裝配、質量檢測、物流倉儲、運維服務等)進行實時感知、動態(tài)分析、自主決策和精準執(zhí)行,最終實現(xiàn)高度柔性化、個性化、高效化和高質量生產的先進制造模式。其核心目標是實現(xiàn)從“大規(guī)模標準化生產”向“大規(guī)模個性化定制”的敏捷轉變。
二、離散型智能制造的核心特征
- 高度集成與互聯(lián):通過工業(yè)互聯(lián)網平臺,實現(xiàn)設備(如機床、機器人)、系統(tǒng)(如ERP、MES、PLM)、產品、人員之間的全面互聯(lián)與數(shù)據(jù)貫通,消除信息孤島。
- 數(shù)據(jù)驅動與智能決策:生產過程中產生海量數(shù)據(jù),通過大數(shù)據(jù)分析和AI算法,實現(xiàn)對設備健康預測、質量缺陷溯源、生產節(jié)拍優(yōu)化、供應鏈協(xié)同等環(huán)節(jié)的智能決策,從“經驗驅動”轉向“數(shù)據(jù)驅動”。
- 柔性化與可重構性:生產線能夠快速調整,以適應多品種、小批量的生產需求。通過模塊化設計和可編程設備(尤其是智能機器人),實現(xiàn)生產資源的靈活配置與流程重組。
- 人機協(xié)同與自主化:強調人與機器的優(yōu)勢互補。智能機器人在承擔重復、繁重、高危任務的與工人協(xié)同作業(yè),人類則更多地從事創(chuàng)新、規(guī)劃、監(jiān)控和異常處理等高級工作。
- 全生命周期管理:利用數(shù)字孿生技術,在虛擬空間構建與物理實體完全映射的數(shù)字化模型,實現(xiàn)從產品設計、仿真、生產到售后服務全生命周期的透明化管理和持續(xù)優(yōu)化。
三、智能機器人在離散型智能制造中的角色與特征
智能機器人是離散型智能制造的關鍵物理載體和執(zhí)行單元,其特征與制造系統(tǒng)的智能化特征深度契合:
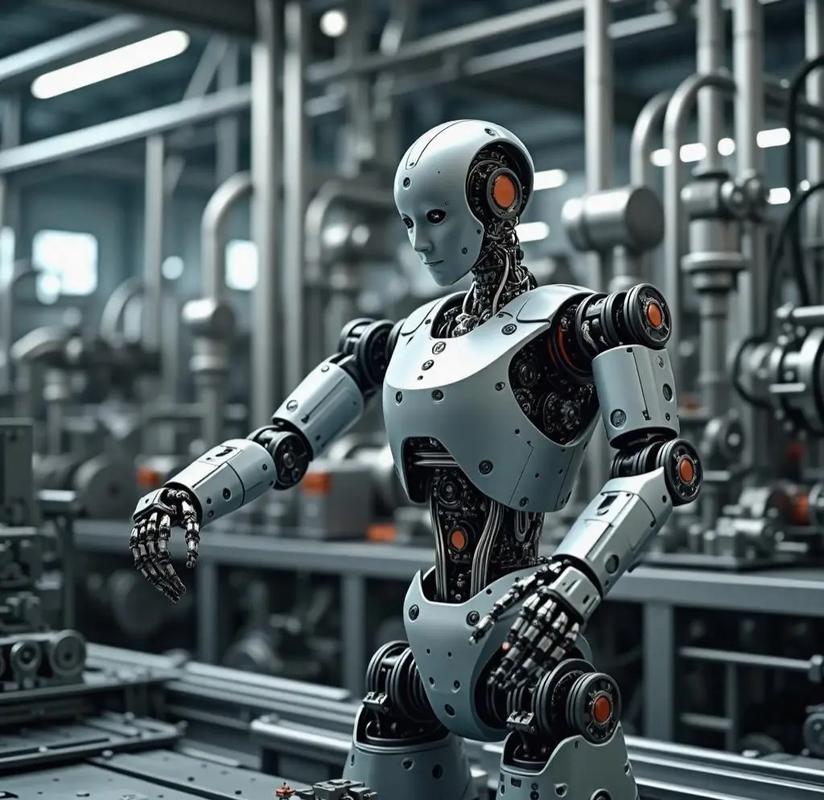
- 感知與適應能力(智能化):搭載視覺傳感器、力覺傳感器、激光雷達等,智能機器人能夠“看見”和“感知”環(huán)境與工件,實現(xiàn)精準的識別、定位、抓取和裝配,并能適應微小的位置偏差和工件差異,滿足柔性生產需求。
- 學習與決策能力(自主化):通過機器學習、深度學習算法,機器人可以從歷史數(shù)據(jù)和操作經驗中學習,優(yōu)化運動軌跡、裝配順序,甚至能對簡單的異常情況(如零件卡頓)進行自主判斷和恢復。
- 協(xié)同作業(yè)能力(網絡化):作為物聯(lián)網節(jié)點,智能機器人能與AGV(自動導引車)、數(shù)控機床、其他機器人及中央控制系統(tǒng)實時通信,參與協(xié)同作業(yè)。例如,機器人完成裝配后,通知AGV將半成品運往下個工位。
- 靈活與可編程性(柔性化):不同于傳統(tǒng)固定程序的工業(yè)機器人,新一代協(xié)作機器人(Cobot)更輕便、安全,支持快速拖拽示教和圖形化編程,使得生產線換產時機器人的重新部署和編程變得非常高效。
- 人機安全協(xié)作:具備力控和碰撞檢測功能,無需安全圍欄即可在人類身邊安全地工作,實現(xiàn)了真正意義上的“人機共融”,將人的靈活性與機器人的精準、耐力完美結合。
結論
離散型智能制造是一個以數(shù)據(jù)為血液、以網絡為神經、以智能算法為大腦的有機整體。而智能機器人,則是這個有機體中最具活力的“手、腳和感官”。它們不僅是自動化工具,更是具備感知、決策和學習能力的智能終端。二者的深度融合,正推動著離散制造業(yè)向更高效、更靈活、更智能的方向演進,為未來工廠描繪出清晰的藍圖。理解其概念與特征,對于企業(yè)規(guī)劃和實施智能化轉型具有重要的指導意義。